


发布时间:2020-06-02
阅读量:1363
卡西欧早年就以电机马达、继电器等机电产品闻名。如今的卡西欧本身就是MEMS的制造商之一,用MEMS的思路解决传统机械手表遇到的问题是卡西欧的拿手好戏。所以,PRO TREK严格来说是一块真正电子表,它的三重感应器的功能也是以电路的形态集成到SoC芯片里面的。
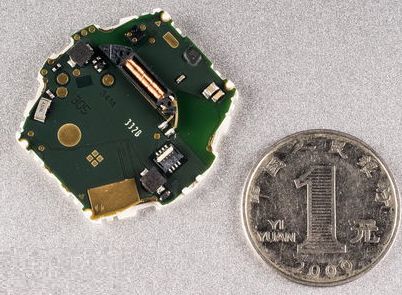

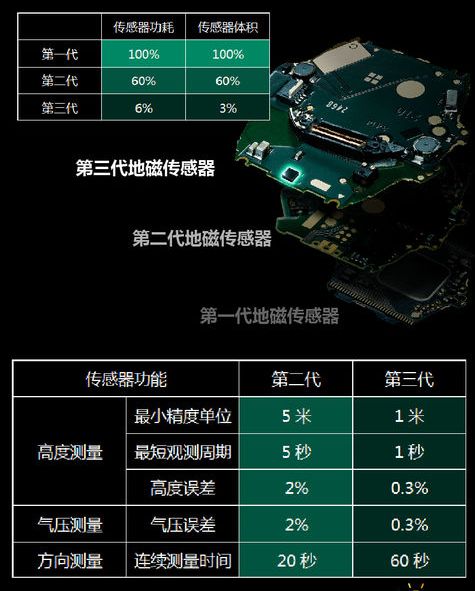
PRO TREK内部的传感器元件 根据卡西欧官方提供的资料,第三代“三重感应器”的压力、温度、地磁传感器均使用了MEMS技术,其中最重要的地磁传感器集成到了一颗芯片里面(SoC),传感器的本体结构和微执行器、信号处理器、控制电路、通讯接口和电源等部件通过电路紧密的联系在一起,一次性就能完成数据的采集、处理和传输,并将准确的结果通过表盘上的各种指示反馈给用户,大幅度提高了系统的自动化、智能化水平。
MEMS应用范围很广,封装应根据实际终端应用要求(如保护性、气密性、散热性等)进行设计。
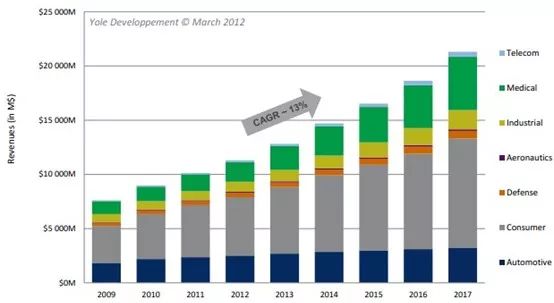
消费电子/移动应用驱动MEMS市场快速成长,复合年增长率可达13%。
未来5年通信和医疗应用增长最快,复合年增长率高达20%。
工业MEMS应用也不错,复合年增长率为13%。
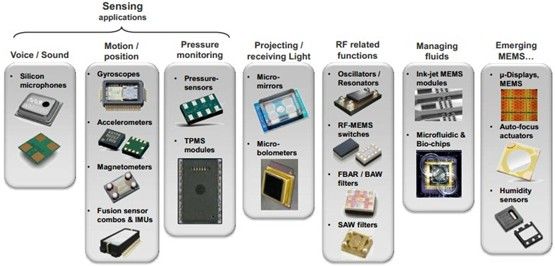
智能手机中的MEMS和传感器
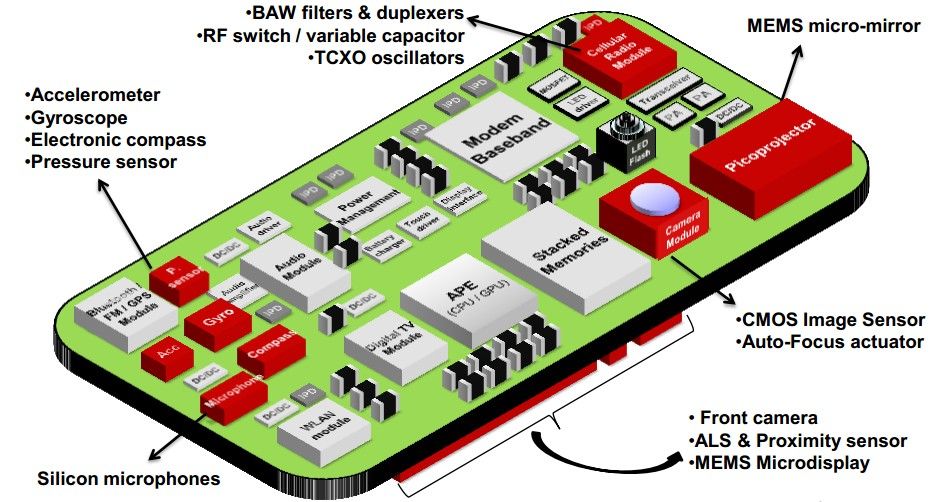
智能手机中使用到很多MEMS器件,如加速度计、陀螺仪、电子罗盘、压力传感器、硅麦克风、图像传感器、MEMS微镜、BAW滤波器和双工器、射频开关、TCXO振荡器/谐振器等。
随着智能手机出货量的迅速增长,移动产业正逐步转向一个复杂的遥感平台,而MEMS和传感器是该系统中最重要的一环,每个MEMS器件的增长都是令人印象深刻的。
对MEMS封装、组装和测试的影响
MEMS的封装、组装、测试和校准(包括基底成本)占整个MEMS模块成本的35%-60%。
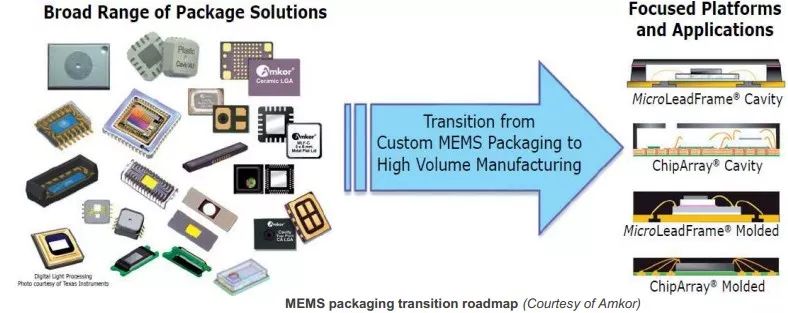
MEMS封装类型比标准IC封装更为复杂,因为MEMS封装需要“System-in-Package”。
此外,大多数MEMS封装需要符合最终应用环境。
MEMS封装从定制化小批量发展到量产必须标准化,这样才能保证降低MEMS传感器成本、实现大批量出货。
MEMS加速度计成本分析
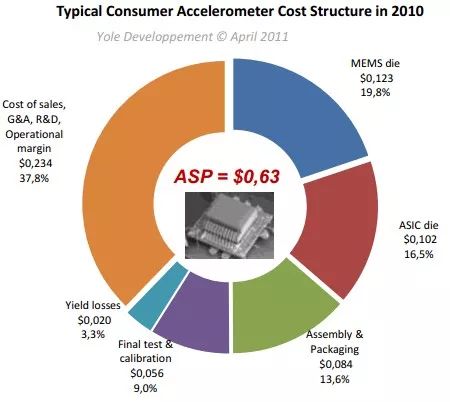
消费类加速度计成本分析
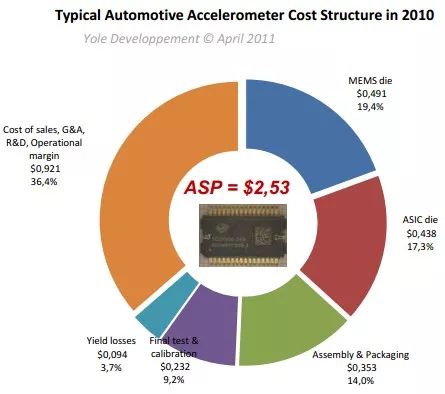
汽车类加速度计成本分析 惯性MEMS封装的技术演进
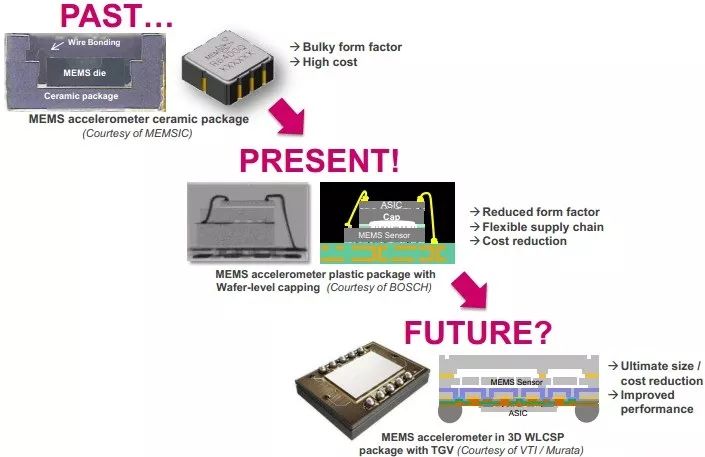
MEMS定律正在改变
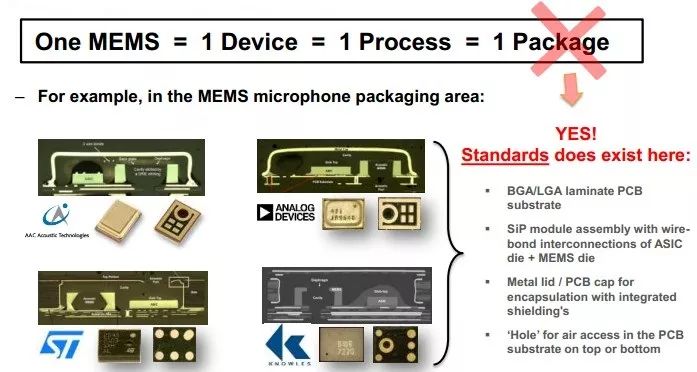
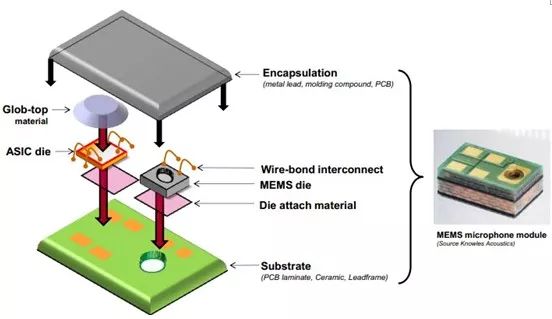
MEMS麦克风封装的关键要素
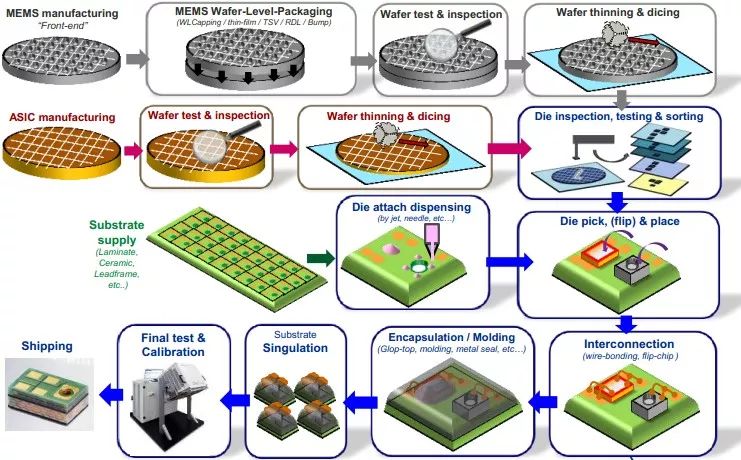
MEMS模块封装:关键制造步骤
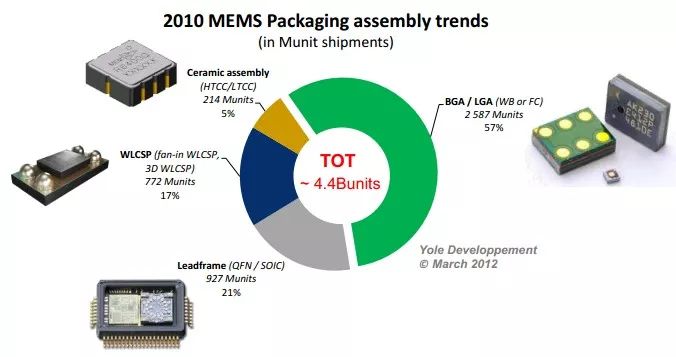
MEMS封装趋势
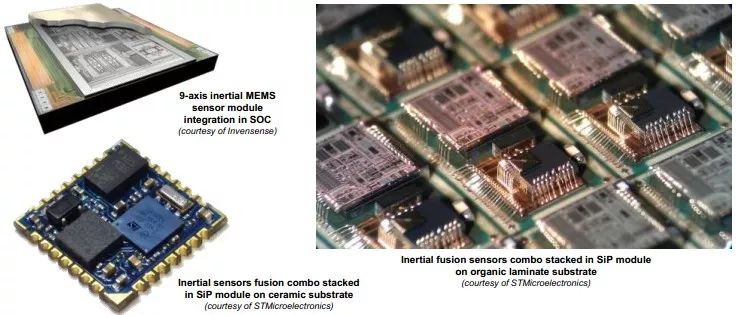
组合传感器封装发展趋势 通过SOC/SiP组合所有运动传感功能:
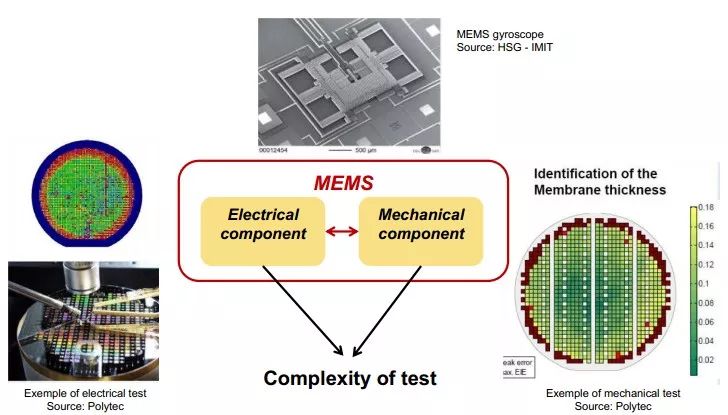
MEMS测试介绍 MEMS产业的特异性:电学测试+机械测试
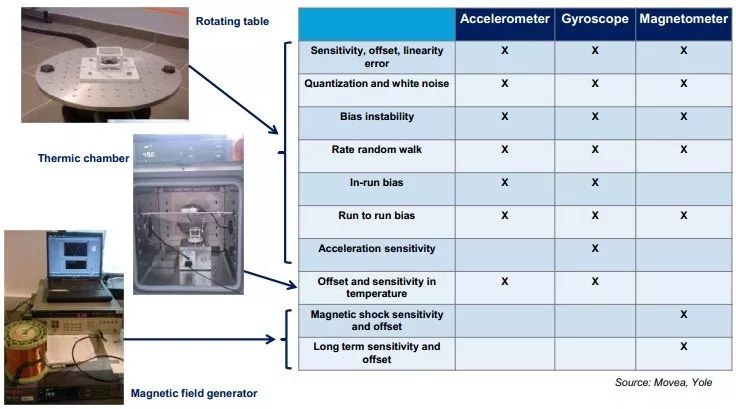
MEMS惯性传感器最后阶段的测试和校准
根据IHS Markit(消费者和移动设备运动传感器——2017年)的数据,无人机和玩具直升机中MEMS运动传感器(即加速度计、陀螺仪、IMU和压力传感器)的市场至2021年预计将达到约7000万台,而其2018至2021复合年增长率可达到17%。
MEMS传感器对无人机飞行性能的影响 得益于采用惯性MEMS传感器,无人机可确保其方向稳定,并可由用户精确控制,甚至可自主飞行。然而,一些挑战使无人机系统设计变得十分复杂,例如电机未完美校准,系统动态可能根据有效载荷而变化,操作条件可能出现突变,或传感器存在误差。这些挑战会造成定位处理偏差,并最终导致导航期间的位置偏差,甚至造成无人机失效。
要使无人机超越玩具的范畴,高品质MEMS传感器和先进软件至关重要。无人机的惯性测量单元(IMU)、气压传感器、地磁传感器、应用特定型传感器节点(ASSN)和传感器数据融合的精度对其飞行性能有着直接和实质的影响。
尺寸限制以及苛刻的环境和操作条件(如温度变化和振动)将对传感器的要求提升到新的水平。MEMS传感器必须尽可能避免这些影响,并提供精确、可靠的测量。
有多种方法可以实现出色的飞行性能:软件算法,如传感器校准和数据融合;机械系统设计,例如减少振动,以及根据无人机制造商自己的要求和需求选择MEMS传感器。下面就让我们仔细研究一下MEMS传感器并参考部分示例。
无人机的核心在于其姿态航向参照系统(AHRS),其中包括惯性传感器、磁力计和处理单元。AHRS估算设备定位,例如滚动、俯仰和偏航角。传感器误差(如偏移、灵敏度误差或热漂移)会导致定位错误。图1显示了加速度计偏移函数形式的定位误差(滚动、俯仰角),这通常是造成传感器连续误差的核心根源。例如,仅20 mg的加速度计偏移便会导致设备方向出现1度误差。
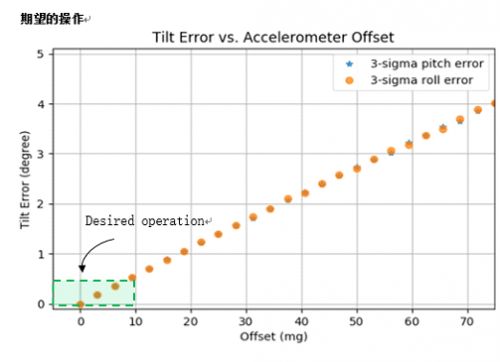
图:加速度计偏移引起的倾斜误差
惯性测量单元(IMU) IMU包括加速度传感器和陀螺仪,以及相应的嵌入式处理程序。这使其能够在线性移动和旋转方面识别运动。
Bosch Sensortec的BMI088是一款六轴IMU,具有低噪声16位加速度计和低漂移16位陀螺仪。这种高精度设备的技术源自高端汽车传感器,因此可在长时间内提供出色的偏置和温度稳定性,并具有高振动稳定性,使其成为无人机应用的理想选择。
图显示了BMI088在不同温度下的典型偏移漂移。
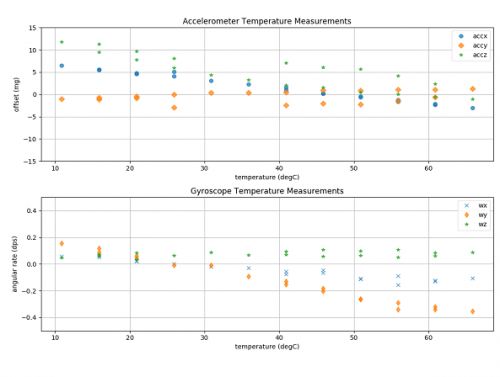
图:BMI088在不同温度下的典型零重力和零速率偏移漂移
所示的加速度计偏移漂移范围仅为10 mg,而陀螺仪传感器的偏移漂移则小于0.5 dps。此外,BMI088随温度变化呈现线性趋势,且滞后非常小。这使得BMI088十分适用于无人机和机器人应用。
气压传感器 无人机内置的高性能气压传感器可精确测量高度,并与IMU的高度控制读数结合使用。气压传感器必须尽可能避免外部影响和不准确性。
如今,结合诸如GPS和光流等附加传感器,距离传感器可用于提高系统的可靠性并减少位置误差。
Bosch Sensortec的新型BMP388气压传感器提供高度信息,以改善飞行稳定性、高度控制、起飞和着陆性能。这使得无人机控制轻而易举,由此吸引更广泛的用户。

对无人机中压力传感器的要求通常非常苛刻。由于受到不理想天气和温度条件的影响,高度精度必须保持在严格的公差范围内,而且传感器必须具有低延迟性,以及在长时间下的极低漂移。BMP388满足这些苛刻要求,相对精度达+/-0.08 hPa(+/- 0.66m),绝对精度为300至1100 hPa +/- 0.5 hPa,低TCO通常低于0.75 Pa/K。它具有极具吸引力的性价比、低功耗和仅为2.0 x 2.0 x 0.75mm³的极小封装尺寸。
除了TCO改进之外,还有多种因素有助于提高整体精度:相对准确度、噪声、稳定性和绝对精度。从笨拙的玩具到高精度飞机;只要工程师想得到,目前创新工业和商业无人机的应用潜力可以说无边无际。
磁力计 磁力计如同一部指南针,可以根据地球的磁场实现无人机的航向。Bosch Sensortec的BMM150就是一个例子,这是一部三轴数字地磁传感器。
BMM150与BMI088型IMU结合使用,可提供九自由度(DoF)解决方案,用于航向估算和导航。在宽泛温度范围内的稳定性能、16位分辨率和抗强磁场的能力(无磁性可实现稳定的传感器偏移)使BMM150非常适合无人机应用,并最大限度地减少了传感器偏移校准所需的工作量。
应用特定型传感器节点 应用特定型传感器节点(ASSN)提供高度集成的智能传感器集线器,将多个传感器组合在一个封装中,并配有可编程微控制器。它为运动传感应用提供灵活的低功耗解决方案。
例如,Bosch Sensortec的BMF055是一款带有集成加速度计、陀螺仪、磁力计和32位Cortex M0 +微控制器的ASSN,用于包括传感器输出在内的软件管理。BMF055与定位处理软件相结合可用作AHRS。该设备采用5.2 x 3.8 x 1.1 mm3小型封装,节省了宝贵的空间和重量。该传感器为无人机应用提供了一体化封装。图3展示了BMF055在无人机应用中作为具有集成传感器融合算法的定位处理单元的使用。
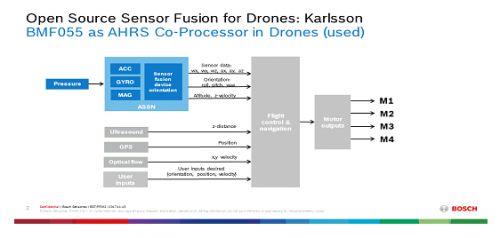
图:BMF055(ASSN)在无人机应用中用作AHRS。
 首页
首页 资讯中心
资讯中心