


发布时间:2020-06-05
阅读量:1325
对于可穿戴电子皮肤和织物而言,在满足轻量和机械柔性、可拉伸功能等功能外,还需要低制造成本,高可靠性,多功能性和长期稳定性。为了实现机械拉伸性,多种工程结构,包括弹性体中的渗流型电荷传输网络,导电的路径(波浪形,蛇形,网状)或结构(皱纹,膨胀),被用来适应外部的机械应变。从材料设计的角度来看,单晶硅纳米膜,金属纳米结构,含碳类纳米材料,以及导电聚合物是WEST领域中常用的候选材料。然而,在多刺激传感能力及其性能(灵敏度,响应时间等),以及长期稳定性和制造成本方面,仍有很大的发展空间。
金属氧化物(MO)半导体(例如IGZO,SnO2,ZnO)和导体(ITO,FTO)等已被大规模成熟的应用在显示器,触摸屏和传感器等领域。从而证明了其在多个方面比上述材料显示出更加优异和稳定的性能。但是,可以维持最大断裂水平约1%的块状金属氧化物本质上很难拉伸到WEST所需的应变程度。此外,合成和加工与其他纳米材料长径比(》1000)相当的MO纳米结构的具有挑战性。
近期,美国西北大学Tobin J Marks, Antonio Facchett课题组联合休斯顿大学余存江课题组和香港城市大学Xinge Yu于欣格课题组在Nature Communications发表研究论文。论文第一作者为美国西北大学的Binghao Wang博士,其他作者包括休斯顿大学的博士生Anish Thukral (并列一作),香港城市大学的Zhaoqian Xie博士, 以及西北大学的Limei Liu, Xinan Zhang 以及Wei Huang。
作者将吹纺技术用于制备多种半导体/导体三维无机纳米纤维网络,包括IGZO,CuO,ITO和Cu,并被用于薄膜晶体管和多功能传感器。基于IGZO纤维网络的晶体管显示出出色的机械柔韧性(弯曲半径低至1 mm)和对NO2气体的高传感、选择性。更令人印象深刻的是,转移至柔性基底(SEBS)上的纤维网络器件具有》50%的高拉伸性并能够灵敏的感应紫外线,温度,压力和人体呼气。最后,作者展示了能够进行多传感器识别的单片集成纳米纤维器件平台。
如图1所示,作者将金属盐和聚合物混合在乙醇中,通过吹纺技术快速大规模制备多种纤维网络。经过400-500摄氏度高温退火后,可以获得多种金属氧化物和金属纤维。
图1:金属和金属氧化物纳米纤维的合成和结构表征。
为了验证无机纤维网络的可拉伸性,作者使用有限元法对其的力学性能计算模拟。单根纤维在不同的应变方向显示出区别很大的应力-应变行为。纤维与应力方向角度越大,其受到的应变越低。实验证明基于IGZO纤维网络的在50%应变时,电阻仅增加6倍,并且以10%应变拉伸-回复5000次循环后性能几乎保持不变。
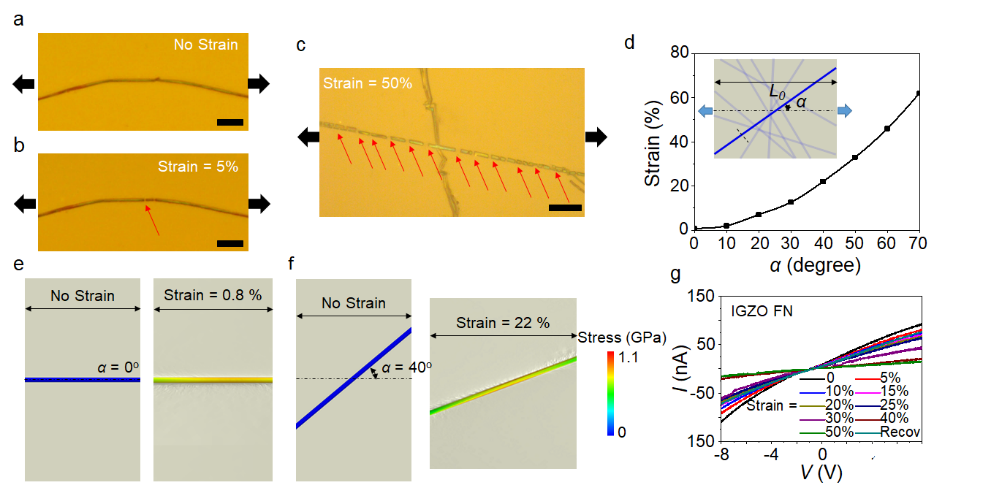
图2:IGZO单根纤维和纤维网络在应变下的实验数据和理论计算。
基于IGZO纤维的晶体管具有出色的机械柔韧性(弯曲半径低至1 mm)和对NO2气体的高传感选择性(灵敏度为33.6%ppm-1)。更令人印象深刻的是,转移至柔性聚[苯乙烯-b-(乙烯-共-丁烯)-b-苯乙烯](SEBS)的IGZO纤维器件能够感应紫外线(比探测率= 5.2×10^10 Jones),温度(灵敏度= 2.2%C-1)和鼻子呼出的呼气。此外,作者展示了用作压力传感器的CuO纤维/SEBS器件。
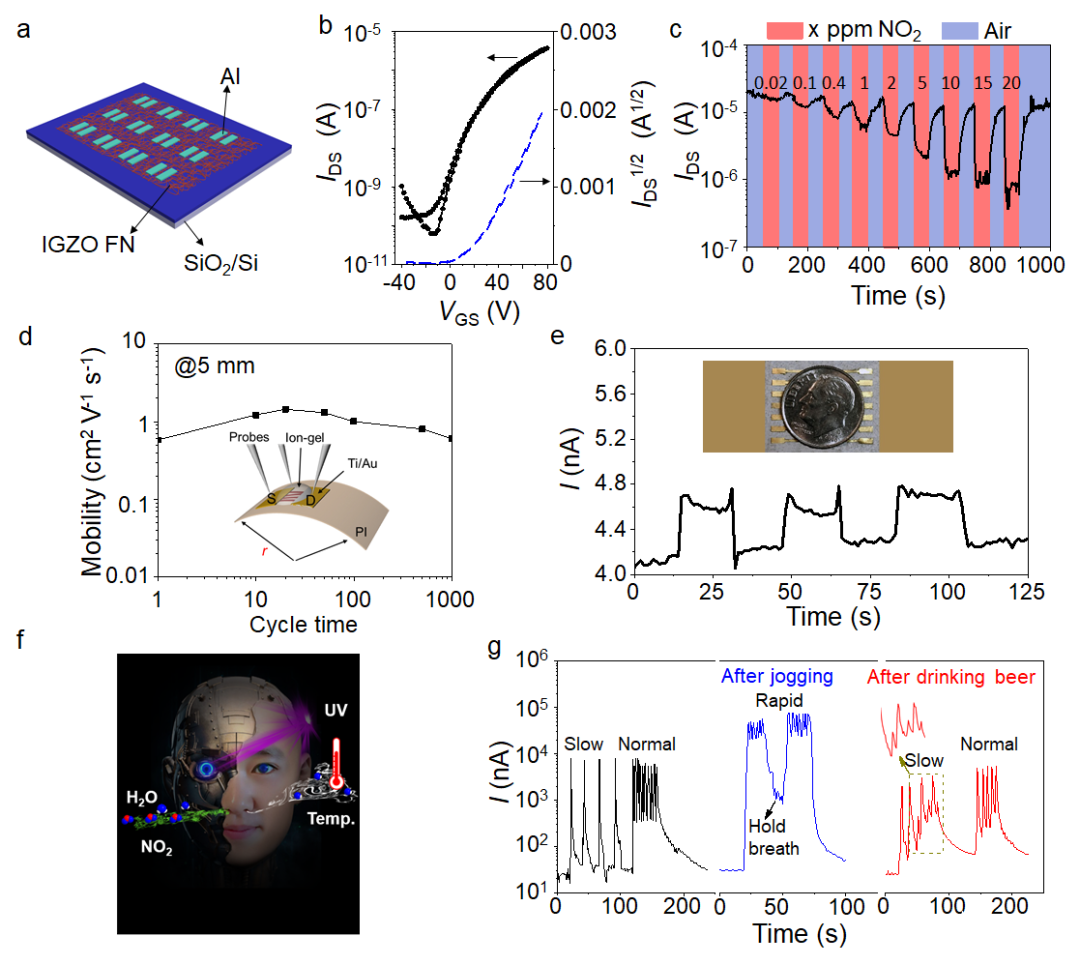
图3:基于IGZO纤维网络的柔性晶体管和可拉伸多响应功能(紫外,气体,温度,呼气和压力)的传感性能。
在最后部分,作者利用可穿戴式的ITO纤维/SEBS用于手势识别。具有出色的操作稳定性和快速的响应/恢复时间。接下来,如图4所示,通过将五个应变传感器安装在手的手指关节上,监视应变传感器的ΔR/ R0与特定手势之间的直接相关性。例如,为了表示“ OK”的符号,拇指和食指完全折叠(ΔR/ R0》 2.0),而中指,无名指和小手指则拉直(ΔR/ R0《0.2)。其它手势,例如“GOOD”,“LOVE”,“GREAT”,“HI”和“VICTORY”都可以以特定的相应手势来识别的。为了识别多种外界刺激,作者以创可贴形式展示了单片集成IGZO+ITO+CuO纤维器件平台。
 首页
首页 资讯中心
资讯中心